
Устройства для точного управления серводвигателями, называемые серво драйверами или сервоприводами, играют важную роль в автоматизированных системах и находят применение в различных отраслях, включая робототехнику, станкостроение, системы глобального позиционирования, 3D печать, автомобилестроение и промышленную автоматизацию.
В начале 1920-х годов появились первые примеры использования серво драйверов в промышленности, такие как системы управления движением в радиоантеннах и телескопах. Эти системы управления базировались на гидравлических и пневматических принципах и управлялись аналоговыми сигналами для задания положения. Внедрение серводвигателей в промышленное производство сыграло ключевую роль в развитии процессов, что привело к появлению первых станков с числовым программным управлением. С появлением цифровых технологий в 1960-х годах стали появляться цифровые серво драйверы, использующие микропроцессоры для более точного управления движением. В 1980-х годах появились серводвигатели с обратной связью, использующие датчики для точного контроля положения и скорости, что увеличило точность и надежность систем управления для различных промышленных целей.
Основные функции и принципы работы серво систем
Сервосистема включает серводвигатель, серво драйвер (или серво усилитель), который получает команды от контроллера и преобразует их в сигналы для управления двигателем. В состав сервосистемы также входят энкодер и сервопередачи, такие как шестерни и ремни. Основные функции серво драйвера следующие:
- Контроль положения: В этом режиме серво драйвер получает команды на заданное положение ротора и управляет движением серводвигателя для достижения этого положения с высокой точностью. Этот режим применяется в устройствах, требующих высокой точности, таких как ЧПУ станки, роботы и системы автоматизации.
- Контроль скорости: В данном режиме серво драйвер управляет скоростью вращения серводвигателя, получая команды на заданную скорость и регулируя напряжение и ток для поддержания этой скорости. Этот режим используется в системах, где требуется постоянная скорость вращения, например, в конвейерах и насосах.
- Контроль момента: В этом режиме серво драйвер контролирует момент вращения серводвигателя, получая команды на заданный момент и регулируя ток для поддержания этого момента. Этот режим применяется в системах, где необходим постоянный момент, например, в тяговых и подъемных механизмах.
Способы управления серво драйвером
Существуют различные способы передачи управляющих сигналов на серво драйвер:
- Аналоговый сигнал. Управление производится путем подачи аналогового токового или потенциального сигнала. Угол поворота двигателя определяется величиной этого сигнала.
- Использование промышленных протоколов:
- Modbus: Обеспечивает базовую скорость и точность управления, но имеет ограничения.
- EtherCAT: Популярный протокол в системах управления движением, предоставляющий возможность высокоскоростного управления сервоприводами с низкой задержкой и высокой точностью.
- CANopen: Протокол обеспечивает высокую скорость передачи данных и часто используется в транспортных приложениях.
- Широтно-импульсная модуляция (ШИМ). Этот метод управления использует импульсы с переменной шириной, частота и длительность которых определяют положение вала сервомотора. ШИМ отличается высокой точностью позиционирования благодаря высокому разрешению энкодера и обеспечивает быструю реакцию системы на изменения входного сигнала.
Варианты импульсного управления
Существует несколько способов импульсного управления серводвигателями:
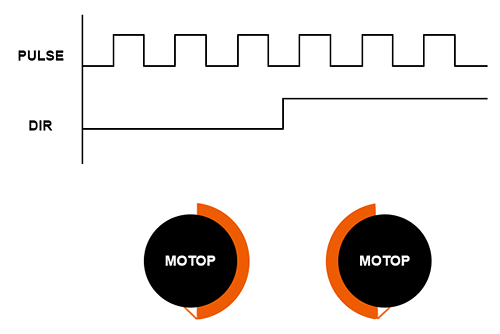
- PULSE/DIR (PUL/DIR): В этом методе используются два сигнала: импульсный (PULSE) и сигнал направления (DIR). Частота импульсов определяет скорость вращения двигателя, а сигнал направления указывает, в какую сторону будет вращаться двигатель (по или против часовой стрелки).
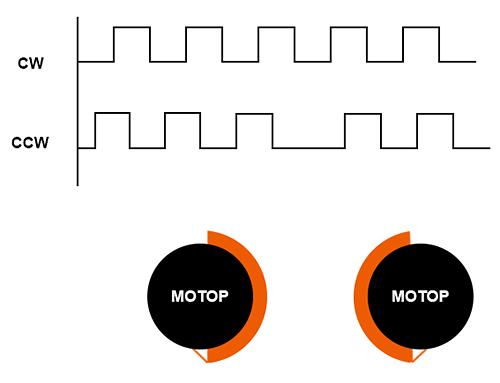
- CW/CCW (CLOCKWISE/COUNTER-CLOCKWISE): Этот метод также использует два сигнала, но каждый из них отвечает за конкретное направление вращения. Сигнал CW управляет вращением по часовой стрелке, а CCW – против часовой. Количество импульсов в каждом сигнале определяет угол поворота двигателя. Импульсный сигнал подается на вход CW или CCW в зависимости от направления.
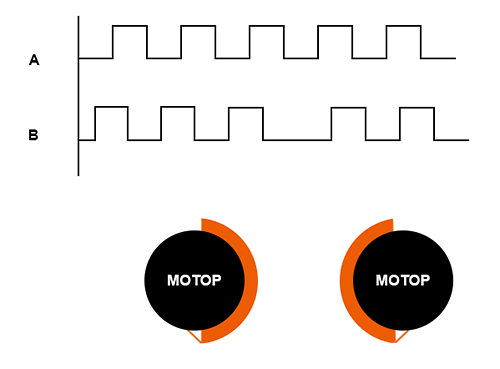
- A/B фазы: В этом методе используются два квадратурных сигнала (A и B), которые смещены по фазе на 90 градусов. Когда фаза A опережает фазу B, мотор вращается в одну сторону, а когда фаза B опережает фазу A – в другую.
Компания Xinje выпускает различные серии сервоприводов, почти все из которых поддерживают импульсное управление. Однако, некоторые конкретные серии поддерживают только импульсный сигнал для управления двигателем и дополнительно поддерживают Modbus.

Стандартные серии: DS5L (до 2.6 кВт), DS5K (до 7.5 кВт), DS5F (до 55 кВт)

Компактные: DS5L1 (до 3 кВт), DS5L2 (до 0.7 кВт), DS5K1 (до 55 кВт)

Серия с возможностью подключения двух моторов: DM5F (до 0.75 кВт)
Эти серии принимают импульсный сигнал по умолчанию, в других же сериях основным является протокольный способ управления:
- EtherCAT (содержат литеру “C”):
- CANopen:
- PROFIBUS (содержит литеру “P”):
- DS5P (до 0.7 кВт)
- Проприетарная шина X-NET*:
- Стандартная серия: DS5E (до 22 кВт)
* описание работы шины X-NET можно посмотреть по ссылке.